






Дистанционно управляемое устройство OceanOne, разработанное в Стэндфордском университете и внешне напоминающее аквалангиста, погрузилось к остову корабля La Lune, затонувщнго в 1664 г., недалеко от Тулона, на глубине около 100 м. Корабль был обнаружен в 1993 г. подводным аппаратом Nautile. В 2012 и 2013 гг. археологический сайт La Lune активно исследовался различными средствами, включая АНПА Girona 500 и Aster X, что показано в документальном фильме Operation Lune: The Sun King's Secret Shipwreck (2013). В конце прошлого года на сайте La Lune испытывался другой прототип, также оснащенный манипулятором с тактильной отдачей (haptic feedback), позволяющий работать с хрупкими предметами. Speedy был разработан французскими инженерами, а соответствующий проект Corsaire Concept поддерживался департаментом подводных археологических исследований (DRASSM) министерства культуры Франции.
http://cs.stanford.edu/groups/manips/ocean-one.html

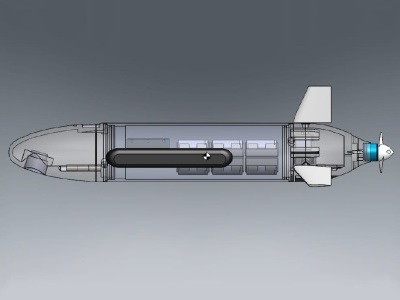
Комплект из трех АНПА Riptide Micro, производства Riptide Autonomous Solutions, заказанный в сентябре прошлого года, поставлен в командный центр SPAWAR Systems Center – Pacific. Вес каждого аппарата всего 8,6 кг, и если бы не выступающие стабилизаторы, то он вписался бы в габариты "A" size sonobuoy (4.875" × 36").
https://riptideas.com/2016/03/first-micro-uuv-production-delivery/

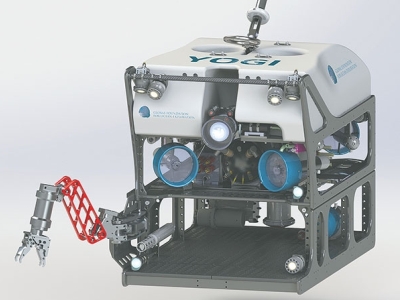
Исследователям из Yellowstone National Park для изучения гидротермальных экосистем одноименного озера понадобился новый ТНПА. Краудфандинг на «Кикстартере» помог фонду GFOE (Global Foundation for Ocean Exploration) за месяц собрать $100 тыс. – около половины предполагаемой построечной стоимости телеуправляемого по кабелю аппарата, названного Yogi.
http://www.engineeringfordiscovery.org/yellowstone/
По всему миру проводятся 26 региональных этапов соревнований по подводной робототехнике MATE ROV Сompetition, победители которых 23–25 июня будут состязаться в NASA's Johnson Space Center's Neutral Buoyancy Lab в Хьюстоне (США). Российский региональный этап в классе Ranger проходил во Владивостоке в бассейне МГУ им. адм. Г.И. Невельского и был организован Центром развития робототехники (ЦРР). Судейство технических докладов, как и в прошлом году, велось специалистами Института проблем морских технологий ДВО РАН. Одновременно с ROV Competition в другой части бассейна прошли состязания автономных (без кабеля) подводных роботов на базе конструктора MUR. Команды-призеры отправятся в Казань на Всероссийскую Робототехническую Олимпиаду #ВРО2016, где в этом году введена «Водная категория».
http://fareast.marinetech2.org/
Обзор подготовил Д.Г.Ляхов


