




В промежутках между большими морскими операциями проводились работы по созданию глубоководных аппаратов, предназначавшихся для геологических исследований в различных районах Мирового океана, богатых залежами минеральных ресурсов, в частности, железо-марганцевых конкреций (ЖМК). Прототипом для "геологических" аппаратов служил разработанный в 1988 году АНПА "МТ-88", в структуре которого нашли применение инновационные достижения в области электроники и компьютерных технологий. Испытания аппарата происходили в бухте Троица залива Петра Великого летом 1988 года на арендованном судне "Кассис". На следующий год после модернизации аппарат участвовал в исследованиях залежей ЖМК в Тихом океане в районе океанических разломов Кларион и Клиппертон. Экспедиция, организованная в рамках комплексной программы "Интерокеанметалл", базировалась на судне "Геолог Петр Антропов", приписанному к порту Находка. Результаты проведенного эксперимента подтвердили эффективность использования АНПА для геологоразведки на больших глубинах.
В 1990 году Михаилу Дмитриевичу Агееву был присужден международный диплом "INTERVETION / ROV'90" первой степени за лучшую работу года и вклад в прогресс мировой подводной робототехники. В этот же период он был избран в члены американского научного Общества морских технологий и в состав оргкомитетов ряда международных форумов.
Проект автономно-привязного аппарата "TSL" (Tunnel Sea Lion) был разработан в 1994 году по предложению частной фирмы Hibbard Marine (США) для выполнения работ, связанных с обследованием протяженных водозаполненных тоннелей и водоводов. При проектировании аппарата был использован опыт ИПМТ по созданию подводных аппаратов модульной конструкции.
Первая модификация "TSL" проектировалась как автономный аппарат, предназначавшийся для инспекции технического состояния внутренних поверхностей протяженных водоводов. В соответствии с данной задачей предусматривалось оснащение аппарата системами технического зрения и специальными исполнительными органами для обеспечения движения вдоль тоннеля и безопасности в условиях стесненного пространства. В дальнейшем в процессе работы над проектом конфигурация аппарата неоднократно подвергалась модернизации, и на заключительном этапе было принято решение оснастить аппарат оптоволоконным кабелем с тем, чтобы часть функций "интеллектуального" управления передать оператору. По завершению контракта с фирмой-заказчиком аппарат в автономно-привязном варианте стал использоваться для отработки различных систем АНПА и проведения опытных работ по экологическому мониторингу и изучению морских биологических объектов. В 2005 году аппарат участвовал в экспедиционных работах в районе поиска затонувшего ледокола "Челюскин".
Аппарат "CR-01" успешно прошел сдаточные испытания в Тихом океане в 1995 году, а в 1997 году аппарат использовался в опытно-методических работах в глубоководном районе Тихого океана, богатом железомарганцевыми конкрециями. В рамках последующего проекта был создан АНПА "CR-02", по своей структуре аналогичный аппарату "CR-01".
По заказу ШИА КАН в это же время был разработан телеуправляемый привязной аппарат "МАКС-2", достойно зарекомендовавший себя в опытной эксплуатации совместно с модернизированным АНПА "Скат" при проведении биологических исследований на Тихоокеанском побережье Дальнего Востока.
АНПА "ОКРО-6000" был разработан по контракту с корпорацией DAEWOO (Республика Корея). Аппарат рассчитан на глубины до 6000 м и предназначался для океанологических исследований. Первые морские испытания аппарата состоялись в 1996 году в Японском море на глубинах 2300 м. Заключительные испытания аппарата проводились летом 1998 года в районе Тихого океана, в котором специалистами KORDI ежегодно проводятся работы по обследованию залежей минерального сырья. Испытания показали работоспособность аппарата и возможность его использования для геологоразведочных работ.
"Солнечный АНПА" (САНПА) создан на основе совместного проекта ИПМТ с Институтом автономных подводных систем (AUSI, США). Проект был направлен на решение проблемы увеличения автономности АНПА путем утилизации энергии солнечного излучения. В 1998 году были изготовлены два макетных образца САНПА, а затем проведены их испытания с целью проверки заложенных принципов. На аппарате, разработанном в ИПМТ, в течение 1999-2001 г.г. был апробирован ряд системных конфигураций для навигации, управления и энергообеспечения, и на заключительном этапе аппарат успешно прошел методические морские испытания в заливе Петра Великого Японского моря. В последующем системы аппараты были модернизированы, и в современном исполнении аппарат используется для экспериментальных исследований и отработки технологии долговременных автоматизированных работ в океане.
-
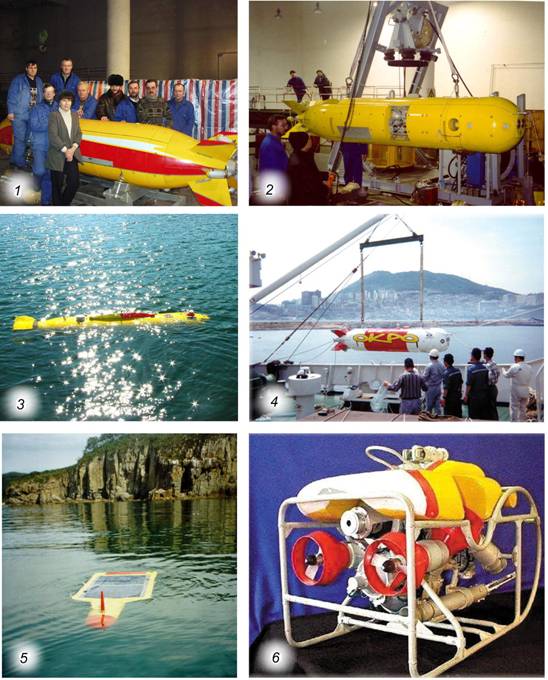
1 - 2. Российско-Китайский проект. АНПА "CR-01" (1995 г.) и "CR-02" (2001 г.)
3. Автономно-привязной аппарат "TSL" во время испытаний. 2004 г.
4. Российско-Корейский проект. АНПА "OKPO-6000". 1996 г.
5. Российско-Американский проект. Солнечный АНПА (САНПА). 1998 г.
6. Российско-Китайский проект. Телеуправляемый подводный аппарат (ТПА) "Макс-2". 1996 г.


